

応力
応力(垂直応力)
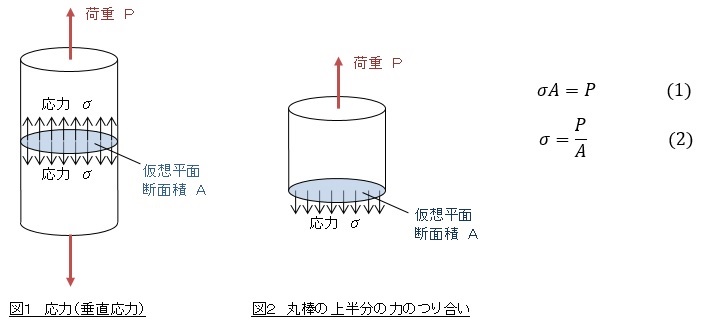
図1に示すような丸棒に引張荷重Pが作用し,かつ静止している場合を考えます。丸棒の中に仮想平面を想定しましょう。 仮想平面に働く単位面積当たりの力を垂直応力σ(normal stress)と呼びます。 ほとんどの場合この垂直応力を単に応力σ(stress)と呼んでいます。 図2のように丸棒を仮想平面で切断しそれに作用する力を考えます。 丸棒は静止しているため力のつり合いが成立します。つり合いを式で表すと式(1)のようになります。 式(1)を変形して式(2)のようになって,応力σは荷重Pを断面積Aで割ることによって求めます。
せん断応力
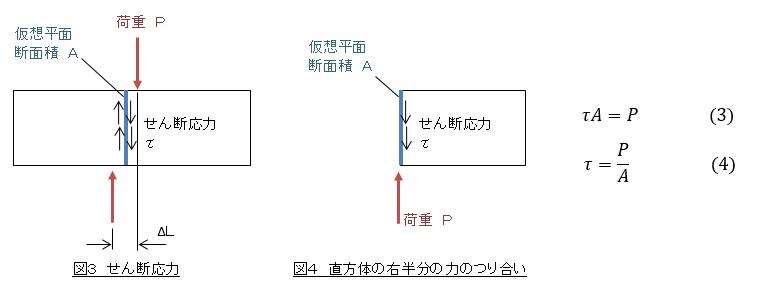
図3に示すような,直方体にせん断荷重Pが作用し静止している場合を考えます。 ここでせん断荷重Pの間隔ΔLはゼロではないが非常に小さな値であるとします。 直方体の中に仮想平面を想定しましょう。 仮想平面に働く単位面積当たりの力をせん断応力τ(shearing stress)と呼びます。 図4のように直方体を仮想平面で切断しそれに作用する力を考えます。 直方体は静止しているため力のつり合いが成立します。 つり合いを式で表すと式(3)のようになります。 式(3)を変形して式(4)のようになって,せん断応力τは荷重Pを断面積Aで割ることによって求めます。
応力の厳密な定義
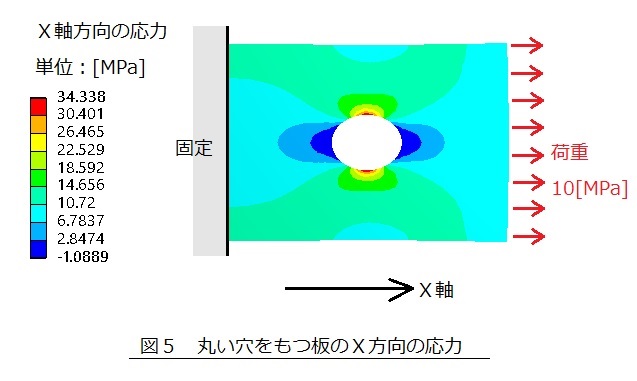
上述した説明では,仮想平面内の応力は位置に関係なく一定値と仮定していました。 しかし実際の応力は図5に示すように場所ごとに異なる値を持ち,座標(x,y,z)の関数となります。
今,図6に示すような物体が下の方で固定されており,上の方で荷重Pが作用しているとします。物体を仮想平面で切断し仮想平面上のある点をP(x,y,z)とし,Pを中心とした微小な面を考えます。仮想平面の法線ベクトルをnとします。太字はベクトルを表しています。そして,微小な面の面積をΔsとします。切断した仮想平面内の微小なΔsには力ΔTが作用しています。
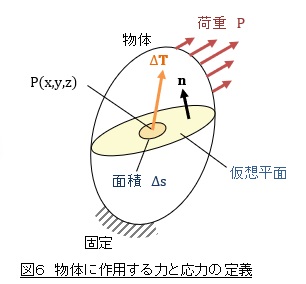
ΔTをΔsで除した値tは,応力と同じ次元を持つベクトル量となります。Δsを限りなくゼロに近づけたとき,「①tはある値に収束すること,②面積がゼロなのでモーメントの腕の長さもゼロで,力のつり合いを考えるときにモーメントのことは考えなくてもよい。」と言えます。Cauchyはこのように考えたそうです。これを「Cauchyの応力原理」と言います。このときのtを表面力ベクトル(traction vector)と言い,面Δsではなく点P固有の値となります。
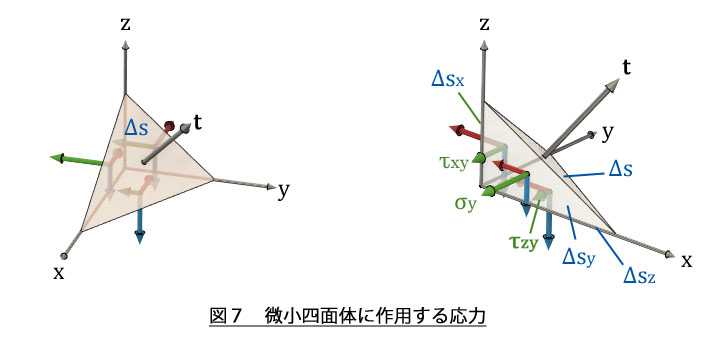
tは,物体を仮想平面で切断したときの方向,つまり,法線ベクトルnの方向によって変化します。普段,x,y,z座標系を使っているので,x,y,z座標系でtを表現しましょう。図7はΔs近傍の領域を,x軸に垂直な面,y軸に垂直な面,z軸に垂直な面でカットした四面体を表しています。四面体の斜めの面がΔs,x軸に垂直な面の面積がΔsx,y軸に垂直な面の面積がΔsy,x軸に垂直な面の面積がΔszです。
この四面体に作用する力についてy方向の力のつり合いを考えてみましょう。x軸に垂直な面Δsxには,x軸方向の応力σxと,y方向のせん断応力τxy,z方向のせん断応力τxzが作用しています。y軸に垂直な面Δsyには,y軸方向の応力σyと,x方向のせん断応力τyx,z方向のせん断応力τyzが作用しています。z軸に垂直な面Δszには,z軸方向の応力σzと,x方向のせん断応力τzx,y方向のせん断応力τzyが作用しています。図にはy方向に関係する応力τxy,σy,τzyだけ緑色で示しています。
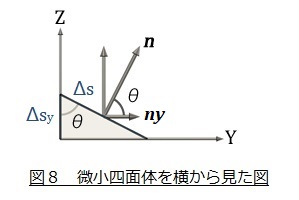
次に,X軸に垂直な面Δsx,Y軸に垂直な面Δsy ,Z軸に垂直な面ΔszとΔsの関係を調べましょう。図8は微小な四面体をX軸から見た図です,ベクトルn はΔs面の法線ベクトルで大きさを1とします。微小四面体のY軸に垂直な面Δsyの面積はΔs・cosθ ですね。また表面の法線ベクトルのY方向成分nyは|n| cosθなのですが,|n| =1なので,ny =cosθです。よって,Δsyの面積はΔs・nyとなります。ここの所,本当は3次元的に説明しなければならないのですが,わかりやすさを優先して2次元で説明しました。(5)式です。

力の釣り合い式です。表面力ベクトルtの Y方向成分ty は物性内部の応力と釣り合っているので次式が成立します。

(6)式に(5)式を代入します。

同様にして以下の3式が成立します。
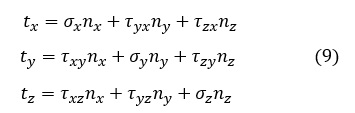
表面力ベクトルt,法線ベクトルnを使って,上式を以下にように表します。
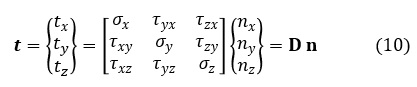
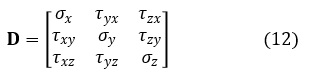
上式をCaychyの式と言います。3行3列の正方行列Dは,任意の切断面の大きさ1の法線ベクトルから,その切断面に作用している表面力ベクトルtを求めるための線形変換作用素ということができます。
また,Dは点Pの応力状態を表現しているテンソル量となります。
点Pは点であって微小六面体ではないのですが,六面体を使って応力テンソルの各成分を図9に示します。六面体に9種類18個の応力が作用して釣り合っています。六面体のモーメントもつり合っているはずなので次式が成立します。
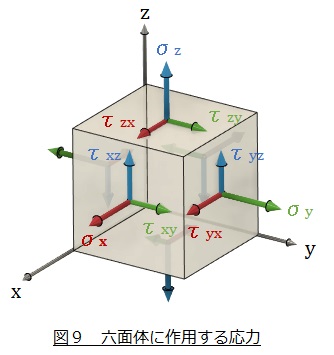

9個の応力成分が6個になりました。P点の応力を決定づける応力テンソルは以下のように3行3列の対称マトリクスで表現されます。以上が応力の定義です。
応力の符号
大事な約束事があります。 図1のように丸棒が引張られているときの応力を引張応力(tensile stress)といい, その符号はプラスです。反対に圧縮応力(compressive stress)の符号はマイナスです。 CAEソフト(有限要素法ソフト)が出力する応力の符号も同じルールで,引張応力はプラス値,圧縮応力は マイナス値です。
応力の単位
応力は単位面積当たりの力なので圧力の単位と同じで,SI単位系での応力の単位は [N/m2]です。パスカル[Pa]と表記します。 他には[N/mm2],[MPa],[kgf/mm2]なども使われます。 有限要素法で計算するとき,荷重の単位をニュートン[N]や[Pa]で入力し三次元モデルを[m]で作成した場合, 解析結果の応力の単位は[Pa]となります。 荷重をニュートン[N]や[MPa]で入力し三次元モデルを[mm]で作成した場合,応力の単位は[MPa]となります。 有限要素法で計算した結果を報告書にまとめるときは[MPa]を使うとよいと思います。 別のページで述べることになりますが,ヤング率も圧力と同じ単位で [GPa]がよく使われます。それぞれの単位換算を表1に示します。

Information
仮想仕事の原理 を追加しました。
 Copyright(C) CAEと強度計算の森 all rights reserved.
Copyright(C) CAEと強度計算の森 all rights reserved.